
今天上午,神舟十二号三名航天员协同配合,正在进行中国空间站首次出舱活动。这是继神舟七号飞行乘组顺利完成出舱任务后,时隔13年,中国航天员再次执行出舱任务。
在这次出舱任务中,三名航天员都有哪些任务?彼此之间又是如何分工的呢?一起来了解一下!
三名航天员,分工明确!
此次航天员出舱活动,三名航天员都有明确分工。
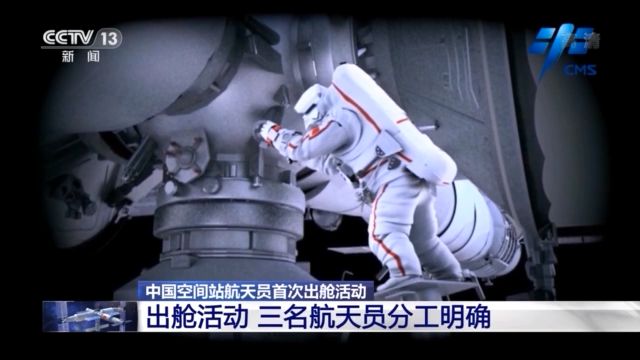
出舱的两名航天员,一人要为机械臂安装上臂支架,包括脚限位器、工具台等,随后借助机械臂进行移动。另一名航天员借助舱壁上安装的扶手,爬行一段距离到作业点进行辅助工作,其间还要进行一次应急返回验证。

中国航天员科研训练中心选训室主任 王焰磊:因为航天员在舱外做一些作业任务的时候一旦出现紧急情况,那么航天员必须要快速、紧急返回到气闸舱里边,然后用我们舱载的应急供氧来保证生命安全,所以也要做这方面的验证。
出舱航天员任务之一:抬升舱外全景摄像机位置
此次出舱活动的另一项重要工作,就是进行舱外全景摄像机的抬升。

中国航天员科研训练中心选训室主任 王焰磊:事先,摄像机由于发射的外暴露的限制,把摄像机安装在了一个比较低的位置,它的视场角还是有限的,入轨之后,航天员根据任务需要,需要扩展摄像机的视角来监视整个舱外的情况,需要航天员去把这些摄像机安装一个支架,架得更高一点。
舱内航天员:操作控制机械臂
两名航天员出舱过程中,舱内航天员需要对机械臂进行操作,虽然地面人员也可以对机械臂进行大范围转移,但在有航天员站在机械臂上的时候,舱内航天员可以更直观的对机械臂位置进行观察,更能与舱外航天员进行直接交流。

中国航天员科研训练中心选训室主任 王焰磊:那么这个时候呢,因为我们地面的监控手段是有限的,所以需要舱内的航天员和舱外的航天员之间通过话音沟通,包括舱内的航天员通过仿真软件和他看到的图像,进行一些判断来进行操控。
另外,由航天员自主操作机械臂,在安全性上也有更好的保障。

中国航天员科研训练中心选训室主任 王焰磊:一方面是通过我们仿真软件的预警功能,另外一方面,舱外航天员和舱内航天员都有急停装置,舱外的航天员在运动过程中如果一旦发现有碰撞的可能、风险的话,他可以直接按下急停装置,机械臂就会停止工作,也是保证安全的多重手段。
通过航天员在中国空间站的首次出舱活动,航天员出舱能力、应急能力都能够得到有效验证,特别是在舱外进行长时间工作,人与装备的结合为后续航天员对空间站进行维护提供了宝贵经验。
文/记者 王刚 刘冠青 孔方舟 占康 张成 刘磊
编辑/戴幼卿







