由北京市人民政府、中央广播电视总台等联合主办的全球首个世界人形机器人运动会,将于8月14日在北京开幕。随着赛事越来越近,各参赛队伍的准备情况如何?

总台记者 康骏驰:我现在是在世界人形机器人运动会场景类赛项的实训区,我的身后就是生活中非常常见的酒店清洁服务类场景,大家可以看到,这里设置了床、沙发、床头柜、电视柜,机器人需要做的就是从起点出发,推下门把手进入房内,尽可能多且尽可能快地将散布在家具上的矿泉水瓶、一次性饭盒、易拉罐这样的垃圾,扔进垃圾桶内。
记者在实训区看到,中国矿业大学(北京)凌志队的同学们正进行参赛机器人的训练工作。这款机器人身高接近1.5米,全身有23个自由度,单臂最大负载能达到5公斤,借助夹爪可以完成各类抓取任务。

中国矿业大学(北京)凌志队队长 王致远:任务难点第一是开关门的操作, 第二是夹取一些特殊物体,比如夹取塑料袋的时候就容易滑落,夹取一些塑料瓶的时候容易飞出。
根据赛事规则,机器人结束清洁作业后,还需要回到终点才能完赛。而如果机器人在清洁服务中碰倒、碰掉场景内任何物品,或是在执行任务时损坏场景家具、造成物品脱落,以及在清洁时超出规定区域,都会被相应扣分。因此,队员们也专门进行了人机配合专项训练,并对机器人进行了增加防滑垫片等细节的改造。

中国矿业大学(北京)机电学院副教授 郝雪弟:尽管我们的研究对象是矿山领域,但是对于人形机器人,特别是日常消费这个领域,这些机器人的技术是相通的。我们希望通过这个比赛让学生更加深入了解现在人工智能和机器人通用的相关技术。
实战检验 刚下生产线就踏上竞技场
在本次世界人形机器人运动会上,来自上海的机器人选手“探索一号”,是在7月下旬刚刚走下生产线,就立马投入紧张的备赛训练中,现在它准备得如何了?
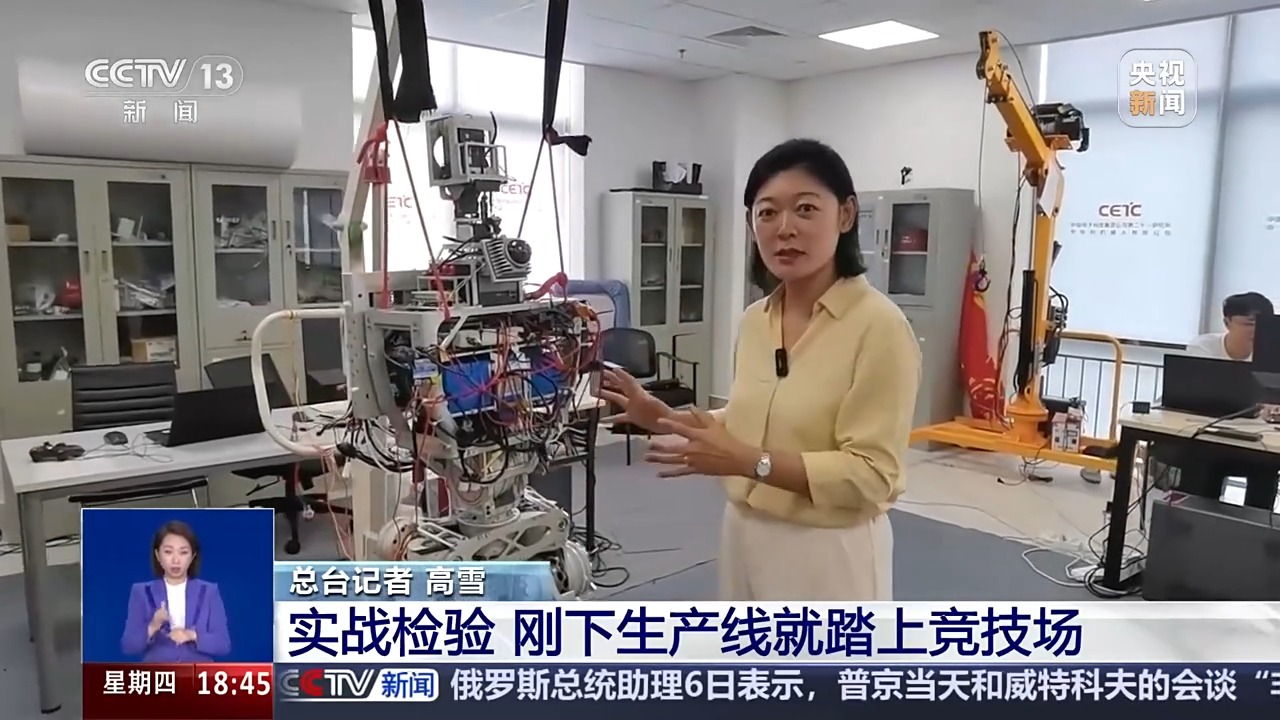
总台记者 高雪:这个就是探索一号的原型机,从骨架上我们可以看到,实际上一个机器人的内部是有上千个零部件组成的,而如果要让这些零部件之间在机器人运动中更加协调和稳定,首先要在仿真环境中进行上万次的试错的训练,才能够实现算法的迭代。
机器人跑步项目,比拼的是机器人的快和稳。经过反复测试,赛前一周,“探索一号”场地测试的平均速度达到每秒2米左右,为了取得更好的成绩,探索先锋队的队员们正加班加点优化算法,调整机器人的各项硬件设施,让“探索一号”更快更稳。

中电科机器人有限公司副总工程师 王洪武:我们给机器人定做了一双橡胶的鞋子,它鞋底有更好的纹路,像轮胎一样,能够提供更好的摩擦力,让它能适应沙地、水泥地各种类型。
“探索先锋队”的队员告诉记者,本次比赛,他们主要是想通过实战检验“探索一号”的运动性能,从而积累在真实环境中的运动数据,可以更好地进行强化训练,适应人类复杂的工作场景。
中电科机器人有限公司副总工程师 王洪武:做一些比较高强度的工作,这个是人没法替代的。我们最终的目标还是希望机器人用在抢险救灾和帮助人解决实际困难和问题。
编辑/胡克青