飞檐走壁、凌波微步、上天下地、无所不能,武林宗师看了都直呼内行!谁能想到,这些关键词竟然是形容一只壁虎的呢。
让我看看是哪只壁虎这么优秀?
喔,原来是蝎尾蜥虎(Hemidactylus platyurus)。
没听说过?不要紧,今天就带你看看它的绝世武功是怎样练成的。
壁虎界的滑翔大师
蝎尾蜥虎是一种常见的壁虎,原产于南亚和东南亚。个头不大,体重2.2克,体长4.5厘米,尾长4.1厘米。它们不仅能借助脚趾上的刚毛爬墙、悬挂在天花板上,此外还可以利用蹼足、皮瓣和尾巴在水上奔跑,简直像超级英雄一样无所不能。
最新的野外观察发现,这种小动物还会通过滑翔,从一棵树转移到另一颗树。尽管蝎尾蜥虎的身体上只有适度的皮瓣,脚趾间的蹼也不突出,不像飞蜥一样是专门的滑翔者(后者具有发达的翼膜),但蝎尾蜥虎同样能够滑翔。
这就奇怪了,难道它们有什么秘密武器?
没错!基于一些野外观察,科学家猜测蝎尾蜥虎在自然界中滑行时,可能会使用尾巴来转向和操纵着陆点。
为此,科学家设计了一系列实验对蝎尾蜥虎的滑翔行为进行量化,以探究尾巴在滑翔和着陆过程中的作用。
科学家在东南亚低地热带雨林中拍摄壁虎滑翔的高速视频,提取了蝎尾蜥虎滑翔的第一个量化数据:滑行接近轨迹、滑行俯仰角度以及着陆速度等。这些数据为我们揭开了蝎尾蜥虎借助尾巴滑翔的奥秘。
短距离滑翔,蝎尾蜥虎有技巧
通常情况下,蝎尾蜥虎在整个滑行过程中都在加速,只有在滑行接近尾声时才会稍微减速。在一半以上的试验中,蝎尾蜥虎到达了它们的目标——空地上的一棵树。
蝎尾蜥虎的滑翔能力相对较弱,这就导致了它们弹道式的短距离俯冲,到达目标时头部先接触树干(隔着屏幕脑壳已经开始痛了),速度为6.0 ± 0.9米/秒。
蝎尾蜥虎在滑翔过程中还表现出姿势的变化:当它们接近目标时会逐渐倾斜,但保持53°的恒定接近角。这一角度与滑翔本领更优秀的壁虎相似,表明蝎尾蜥虎在保持接近矢量的同时,能利用现有的空气动力控制来改变姿态。
通过绘制滑行持续时间的速度图,研究人员发现,当蝎尾蜥虎接近树上的目标时,速度有所下降,这表明它们在尝试一种专门的着陆动作。然而,由于减速过程很短,只能将速度从其峰值飞行速度降低6.4%,这使得蝎尾蜥虎在撞击时必须吸收几乎全部的飞行动量。
在空气动力控制手段极少的情况下高速降落,可能会增加受伤或跌落的风险,以及被捕食的机率。因此,一些较大的壁虎物种甚至有头骨的形态特化,以减少头部受伤的风险(这是脑壳越撞越硬了吗?!)。
着陆的秘密武器——无他,唯尾巴尔
能看出来,为了练就飞檐走壁的绝技,蝎尾蜥虎可谓是使出了浑身解数。咦,浑身?好像没看到尾巴有什么用呢。
别急,尾巴可是蝎尾蜥虎着陆时的秘密武器,这就向你隆重介绍。
1. 着陆阶段的动作顺序
想要知道尾巴的用途,首先需要了解蝎尾蜥虎着陆树干时的动作,它可分为五个阶段:
第一个阶段蝎尾蜥虎正面靠近树干;第二阶段头部和前肢接触树干;第三阶段身体向下旋转,头部离开树干,后肢紧贴树干,尾巴同时向上翘;第四阶段尾巴紧贴树干,躯干往后旋转,前肢离开树干;第五阶段身体达到最大后仰幅度,蝎尾蜥虎会在躯干回到树干前休息片刻。
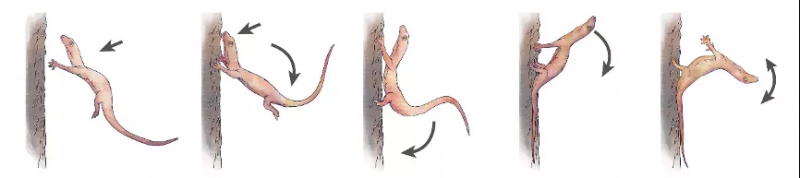
蝎尾蜥虎着陆过程
这种神奇的着陆姿势有何作用呢?让我们来分析一下蝎尾蜥虎不同着陆阶段的力学参数。
蝎尾蜥虎在着陆前,身体从水平方向向上倾斜16°。最先与树干发生碰撞的头和前肢吸收了绝大部分的动能,碰撞增加了角动量,导致身体向下旋转。接着,后肢接触树干。当蝎尾蜥虎的四肢都放在树干上时,会条件反射式地往后拱起尾巴,以消除部分角动量。当前肢开始超过附着极限,即将离开树干时,蝎尾蜥虎的躯干会向后旋转远离树干。这时,得益于尾巴的支撑和后肢的抓握力,蝎尾蜥虎并不会从树干上掉下去。
来自热带雨林的摄像显示,头朝下的撞击会给蜥虎带来大量的俯仰角动量,而通过尾巴创造一个长长的力臂,能使壁虎利用躯干前部向后仰来抵消这种动量,最终仅需较小的后肢粘附力即可成功着陆。
简而言之,蝎尾蜥虎滑翔时,会利用尾巴和后腿安全降落在树干上。相比之下,没有尾巴的壁虎在着陆时,前肢离开树干后很容易坠落。这从反面验证了尾巴在支持身体后仰过程中保持稳定的作用。
2. 动力学模型揭示尾巴的妙用
为了深入了解尾巴对着陆成功率的潜在影响,科学家设计了一个简化的壁虎平面刚体动力学模型。
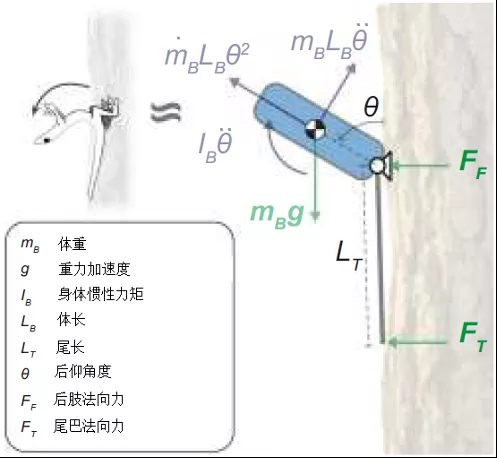
蝎尾壁虎平面刚体动力学模型示意图。外力用绿色粗体表示,而虚拟力用紫色表示
动力学模型预测,保持壁虎附着在垂直树干上所需的后肢吸附力与尾巴长度成反比。
因为可以抵消巨大的倾覆力矩,尾巴能有效减少壁虎靠后肢附着在树上所需的力。相比之下,没有尾巴或者尾巴较短(断尾现象在壁虎中十分常见)的壁虎需要更大的足力来确保成功着陆,而这很可能超过后肢承受力的临界值,因此没有尾巴或者尾巴较短的壁虎成功着陆的概率较低。模型预测,保持无尾壁虎在树干上着陆所需的足力大约是有尾壁虎的5倍。
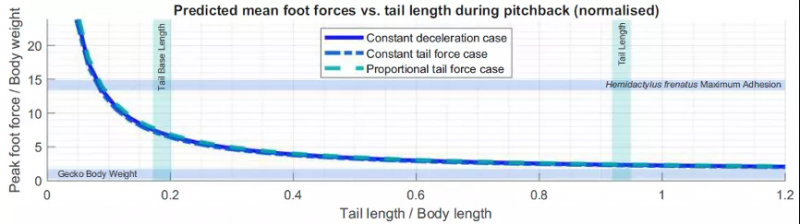
动力学模型预测尾巴长度与后肢附着力的关系
可以发现,模型预测与现场观察到的结果一致。蝎尾蜥虎滑向垂直树干成功着陆的比例高达87%;相比之下,无尾壁虎在与树干碰撞后失去稳定性,很容易坠落。
这些结果支持了基于实地观察的假设,即尾巴可以缓冲作用在四肢上的高冲击力,从而使蜥虎在垂直目标上成功着陆。
3. 壁虎机器人
为了给这一假设提供一条独立的证据线,以补充数学模型,科学家制作了一个壁虎机器人来测试尾巴在稳定着陆中的作用。

壁虎机器人
首先,将机器壁虎放在一个弹射台上,以一定速度将壁虎机器人弹到一块垂直木板上,控制壁虎机器人的前肢、后肢和尾巴落在相应的区域。后肢的区域安装有压力传感器,用于测量后肢的吸附力。壁虎机器人在头部受到撞击后,尾巴会自动向背部方向拱起(类似条件反射)。
科学家让壁虎机器人进行了79次着陆尝试,并使用高速摄像机记录了壁虎机器人着陆过程中主要部位(头、后肢、尾巴)的位置信息。结果显示,壁虎机器人、动态数学模型和现实中蝎尾蜥虎的着陆行为在定量和定性上都很相似。
当前肢第一次接触墙壁时,机器人模型的水平动量迅速转化为角动量。这意味着当机器人模型的后脚到达着陆面时,模型会倾向于继续旋转,如果附着力不足,前脚会脱落。在这个阶段,无尾机器人的后肢通常会脱离墙壁,而有尾机器人的尾巴为后仰提供了阻力,并有效地起到了旋转减震器的作用。
壁虎机器人实验证明了使用尾巴的机械调节来增强着陆稳定性的可行性,尾部缩短则会大大增加着陆时脚部所需的附着力。没有尾巴的壁虎机器人只有15%能够成功着陆,而有尾的壁虎机器人成功着陆的比例则是55%。
来自壁虎的启发,请查收
可见,尾巴对于蝎尾蜥虎的着陆确实有重要作用,这又带给了我们什么启发呢?
在迄今为止调查的一系列空中运动行为中,定向空中下降或滑翔的终端阶段是探索最少的领域,特别是在空气动力控制能力有限的滑翔动物吸收撞击能量的问题上。
蝎尾蜥虎在短距离滑翔时,由于体积小,着陆时采用了简单的机械解决方案——正面碰撞,动能被吸收。蝎尾蜥虎既有爪子,也有粘着垫,这能帮助它们在撞击时形成附着力,结合尾巴辅助反应的策略(通过充当反向杠杆来减少后肢的附着力),可以增加垂直着陆的成功性和稳定性。
对于稳定多模态机器人的设计,我们可以从自然中学到一些策略——通过使用机械调节设计,使着陆控制更简单,从而获得更大的着陆稳定性。这些策略可能会让机器人在面临暂时失去空气动力控制或非结构地形的挑战时,能够充分解决垂直着陆的问题。
此外,作为一种非专门树栖生活的壁虎,蝎尾蜥虎具有在空中定向下降和亚临界条件下着陆的能力,可能支持“行为的出现先于外部形态进化”的观点。
小小的壁虎却身怀绝技,不得不让人感叹造物主的精妙。所以,下次看见会“飞”的壁虎时,别忘了看看它们的小尾巴是怎么工作的。
编辑/王静